50% $160.00









Holybro
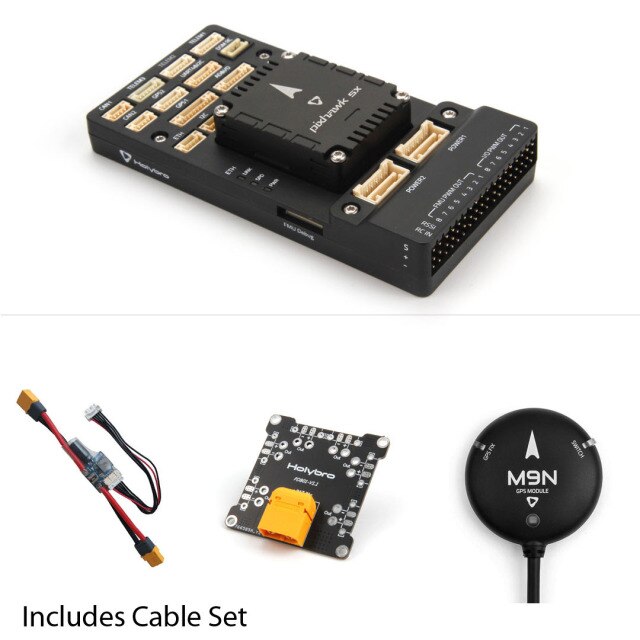
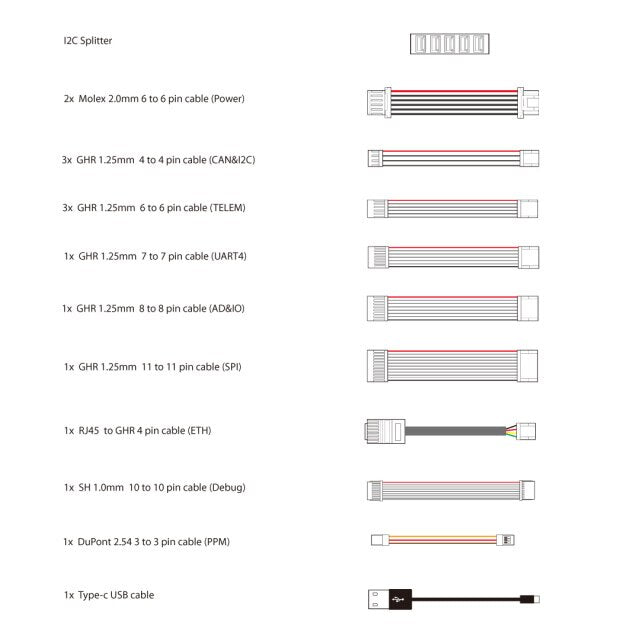
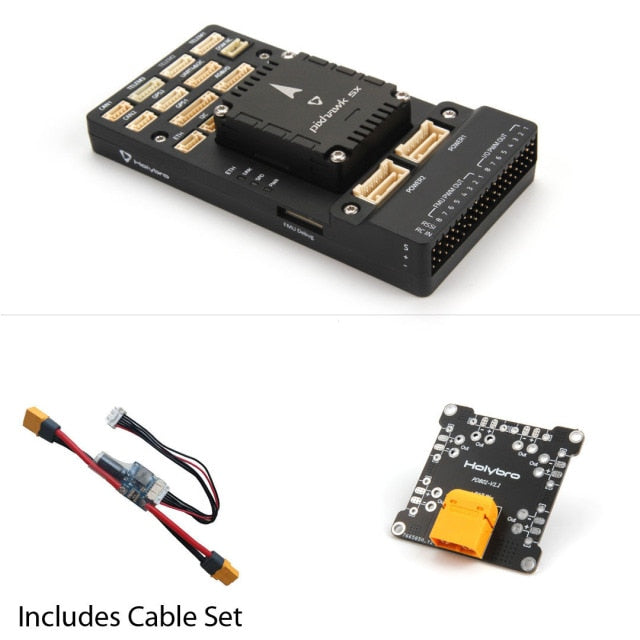
【Discontinued】Holybro Pixhawk 5X Autopilot Flight Controller Baseboard PM02D Power Module M8N M9N GPS for RC Multirotor Airplanes DIY Pats
Product SKU: 48669406-baseboard-only
Available:
Only 0 item in stock
0 item in stock
In stock
Pre-order
Out of stock
$160.00
Want it delivered by