0% $0.00


UAS Factory Co., LTD
Apollo 312 30xoptical zoom12um thermal pixel AI Tracking 3 axis drone gimbal camera
Product SKU:
Available:
Only 43 items in stock
43 items in stock
In stock
Pre-order
Out of stock
$13,999.00
Want it delivered by
Apollo 312 is a cost-effective dual-light camera with three-axis stabilization function, integrated with SONY 30x high-quality starlight optical module and 12μm thermal imaging module, lightweight inclination angle and low wind resistance design, especially suitable for all kinds of UAVs with airspeed (airspeed) not more than 120km/h. The product is powerful and the core technology is independent and controllable. It is suitable for various fields such as situational awareness, forest fire prevention, border and sea defense monitoring, law enforcement evidence collection and remote sensing with large field of view.
It is a low-cost dual-light pod with three-axis stabilization function, integrated with a high-quality SONY 30x starlight optical module and a 12μm thermal imaging module, light tilt angle and low wind resistance, especially suitable for all kinds of UAVs with flight speed not exceeding 120km/h. The product is powerful and the core technology is independent and controllable. It is suitable for various fields such as situational awareness, forest fire protection, border and sea defense, law enforcement evidence collection and remote sensing with large field of view.
-
Rolling axis tilt design
-
Support SDI/ H.264/H.265 digital output
-
SONY 30X Starlight Class Movement
-
Supports S.BUS/TTL/RS232 control
-
12μm pixel pitch thermal imaging movement
-
Supports target recognition tracking function
-
Steering axis 360° rotation
-
Support for MAVLINK control protocol
-
Low wind resistance appearance
-
Adapted to several commercial flight controls

|
Complete machine performance
|
|
|
material (that sth is made of)
|
Aviation aluminum alloy, nylon
|
|
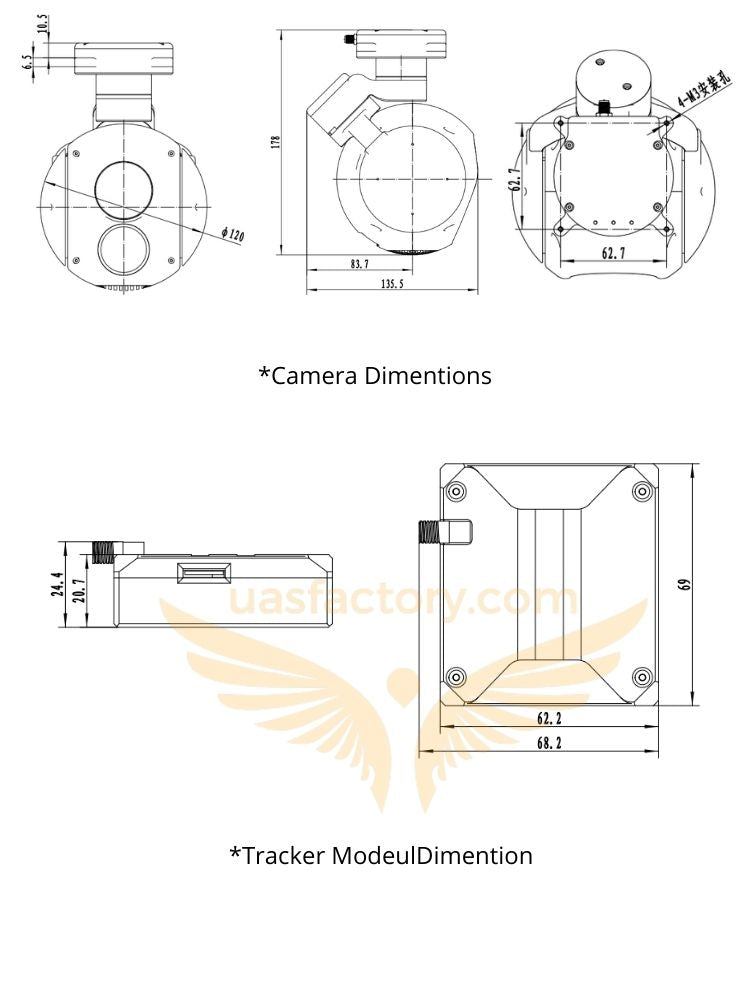
size
|
135.5 (L) x 120 (W) x 178 (H)
|
|
Main body weight
|
950g
|
|
Working temperature
|
-10℃~55℃
|
|
Storage temperature
|
-20℃~60℃
|
|
Number of Steady Image Axes
|
triaxial
|
|
Input Voltage
|
12v
|
|
power (output)
|
20w
|
|
Control angle range
|
360° (heading); -120° to 30° (pitch)
|
|
Amount of angular jitter
|
±0.03°
|
|
control signal
|
S.BUS, serial communication
|
|
mode
|
Direction lock; heading follow; camera facing down
|
|
Visible Light Module Performance
|
|
|
sensors
|
1/2.8-inch Exmor CMOS
|
|
focal length
|
4.3 to 129.0mm
|
|
zoom magnification
|
30x optical zoom
|
|
Focusing speed
|
<1S
|
|
Shutter speed
|
1/1S to 1/10000S, 22 steps
|
|
Horizontal Field of View
|
63.7° to 2.3°
|
|
Video Output Format
|
1080P, 30 fps
|
|
Effective pixels
|
2.13 million
|
|
Image Storage Format
|
JPEG
|
|
Video Storage Formats
|
AVI
|
|
Night Vision Rating
|
starlight
|
|
Thermal Imaging Module Performance
|
|
|
sensors
|
Vanadium oxide uncooled infrared focal plane
|
|
resolution (of a photo)
|
640*512
|
|
Lens focal length
|
25mm
|
|
pixel pitch
|
12μm
|
|
Wavelength range
|
8~14μm
|
|
field of view
|
17° X 14°
|
|
Sensitivity (NETD)
|
|
|
Digital zoom
|
1.0 to 8.0X continuous zoom
|
|
frame rate
|
50Hz
|
|
Photo format
|
JPEG
|
|
Video Format
|
AVI
|
|
polarities
|
Black heat/white heat
|
|
false color
|
backing
|
|
Temperature measurement range
|
-20℃~150℃/100℃~+550℃
|
|
tracker
|
|
|
Tracking accuracy
|
≤1 pixel
|
|
Target capture time
|
≤5 frames
|
|
Anti-obscuring time
|
3 seconds
|
|
Number of multi-target detections
|
≥20
|
|
Minimum size of tracking target
|
10×10 pixels
|
The interfaces located in the pod include: serial port, SBUS interface, power interface, and video output interface. The pod interfaces are defined as shown in Figure 4 and Tables 1, 2, 3, 4, and 5.
1: J1 Interface Definition (SBUS).
Table 2: J2 Interface Definitions (Serial).
|
Serial number
|
name (of a thing)
|
instructions
|
|
1
|
GND
|
power ground
|
|
2
|
UART_TX
|
Serial port transmit 3.3V
|
|
3
|
UART_RX
|
Serial Port Receive 3.3V
|
Table 3: J3 Interface Definitions (Power Supply).
|
Serial number
|
name (of a thing)
|
instructions
|
|
1
|
GND
|
power ground
|
|
2
|
POWER_IN
|
DC input 12V
|
Table 4: J4 interface definition (sdi output).
|
Serial number
|
name (of a thing)
|
instructions
|
|
1
|
SDI_GND
|
SDI Video Output
|
|
2
|
SDI_OUT
|
Table 5: J5 Interface Definition (6pin wire to tracker).
|
Serial number
|
name (of a thing)
|
instructions
|
|
1
|
POWER_OUT
|
DC Output 12V
|
|
2
|
GND
|
power ground
|
|
3
|
CVBS_OUT
|
CVBS Video Output
|
|
4
|
CVBS_GND
|
|
|
5
|
UART_RX
|
Serial Port Receive 3.3V
|
|
6
|
UART_TX
|
Serial port transmit 3.3V
|
The interfaces located on the tracker include: video input interface, network video output interface, and TF card interface. The tracker interfaces are defined as shown in Figure 5 and Tables 1, 2, and 3.
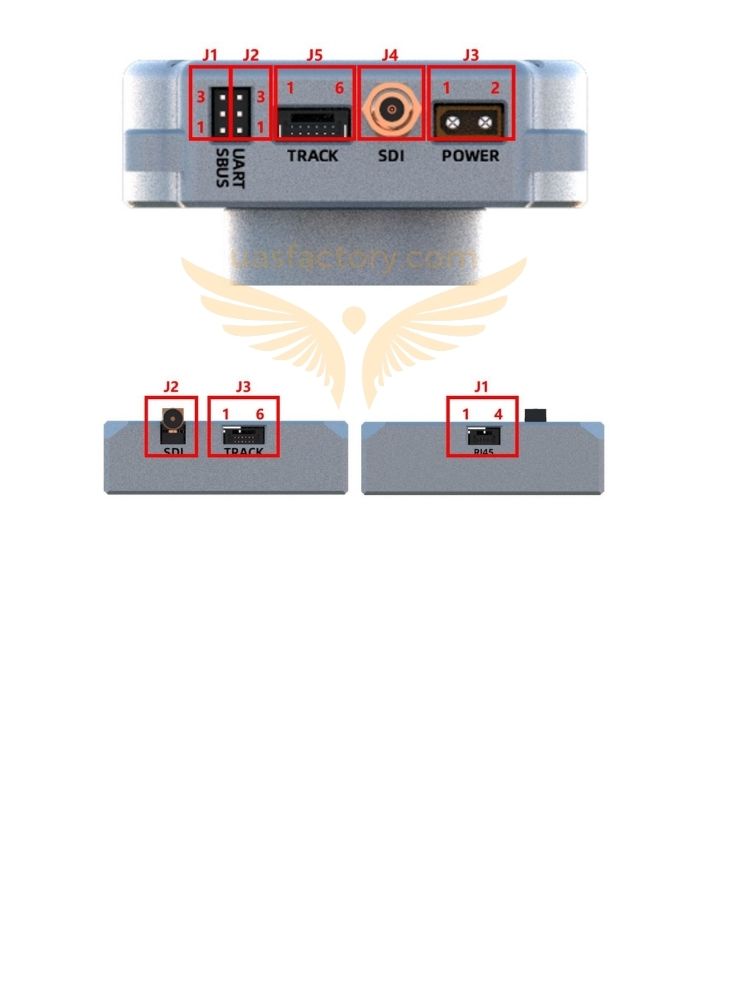
Figure 5: Schematic diagram of the tracker interface
Table 1: J1 Interface Definition (Network Port Video Output).
|
Serial number
|
name (of a thing)
|
instructions
|
|
1
|
TX+
|
Network Video Output
|
|
2
|
TX-
|
|
|
3
|
RX+
|
|
|
4
|
RX-
|
Table 2: J2 interface definitions (sdi input).
|
Serial number
|
name (of a thing)
|
instructions
|
|
1
|
SDI_GND
|
SDI Video Input
|
|
2
|
SDI_OUT
|
Table 3: J3 Interface Definition (6pin wire to pod).
|
Serial number
|
name (of a thing)
|
instructions
|
|
1
|
POWER_OUT
|
DC Output 12V
|
|
2
|
GND
|
power ground
|
|
3
|
CVBS_OUT
|
CVBS Video Output
|
|
4
|
CVBS_GND
|
|
|
5
|
UART_TX
|
Serial port transmit 3.3V
|
|
6
|
UART_RX
|
Serial Port Receive 3.3V
|
Intellectual Property
- Lorem ipsum dolor sit amet, consectetur adipiscing elit. Etiam quis diam erat. Duis velit lectus, posuere a blandit sit amet, tempor at lorem. Donec ultricies, lorem sed ultrices interdum.
- Leo metus luctus sem, vel vulputate diam ipsum sed lorem. Donec tempor arcu nisl, et molestie massa scelerisque ut. Nunc at rutrum leo. Mauris metus mauris, tristique quis sapien eu, rutrum vulputate enim.
- Mauris tempus erat laoreet turpis lobortis, eu tincidunt erat fermentum.
- Aliquam non tincidunt urna. Integer tincidunt nec nisl vitae ullamcorper. Proin sed ultrices erat. Praesent varius ultrices massa at faucibus.
- Aenean dignissim, orci sed faucibus pharetra, dui mi dignissim tortor, sit amet condimentum mi ligula sit amet augue.
- Pellentesque vitae eros eget enim mollis placerat.
Termination
- There are many variations of passages of Lorem Ipsum available
- If you are going to use a passage
- All the Lorem Ipsum generators on the Internet tend to repeat predefined chunks as necessary
- It uses a dictionary of over 200 Latin words, combined with a handful of model sentence structures
- The point of using Lorem Ipsum is that it has a more-or-less normal distribution of letters
- Many desktop publishing packages and web page editors now use Lorem Ipsum as their default model text
Changes To This Agreement
We reserve the right, at our sole discretion, to modify or replace these Terms and Conditions by posting the updated terms on the Site. Your continued use of the Site after any such changes constitutes your acceptance of the new Terms and Conditions.
Contact us
If you have any questions about this Agreement, please contact us filling this contact form.